Patrick M. Pilarski
Ph.D., ICD.D, Canada CIFAR AI Chair & Professor of Medicine
University of Alberta
Alberta Machine Intelligence Institute (Amii)
Biography
Dr. Patrick M. Pilarski is a Canada CIFAR Artificial Intelligence Chair (Amii), past Canada Research Chair in Machine Intelligence for Rehabilitation, and a Professor in the Division of Physical Medicine and Rehabilitation, Department of Medicine, University of Alberta. He is a Fellow and Board Member of the Alberta Machine Intelligence Institute (Amii), co-leads the Bionic Limbs for Improved Natural Control (BLINC) Laboratory, and is a principal investigator with the Reinforcement Learning and Artificial Intelligence Laboratory (RLAI) and iSMART at the University of Alberta. Dr. Pilarski received the B.ASc. in Electrical Engineering from the University of British Columbia in 2004, the Ph.D. in Electrical and Computer Engineering from the University of Alberta in 2009, and completed his postdoctoral training in the Computing Science with Dr. Richard S. Sutton at the University of Alberta in 2014. He graduated from the ICD-Rotman Directors Education Program (DEP) in 2024, and is a holder of the Institute of Corporate Directors Director designation.
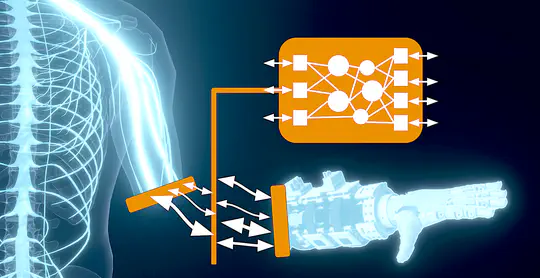
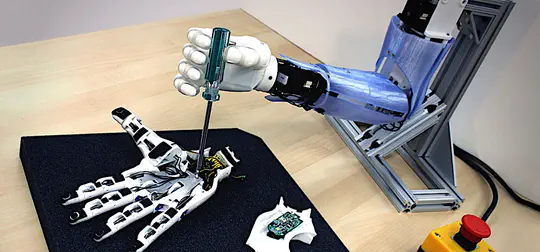
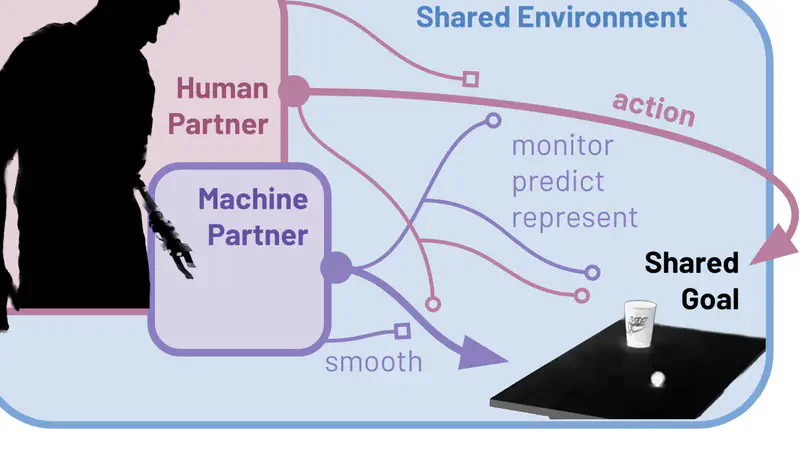
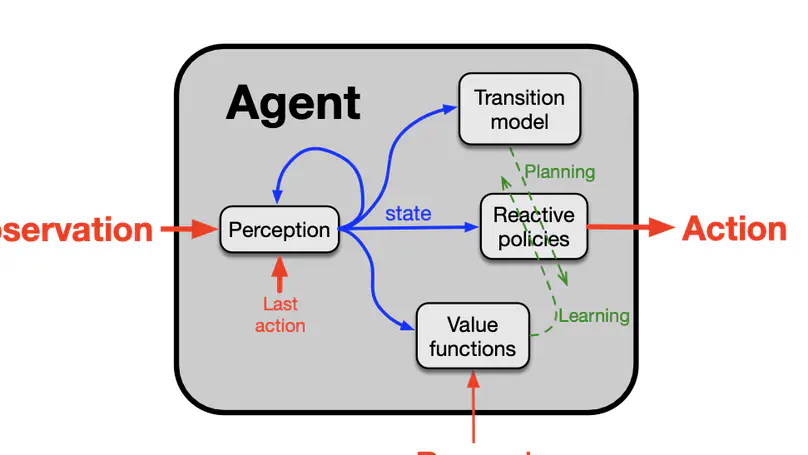
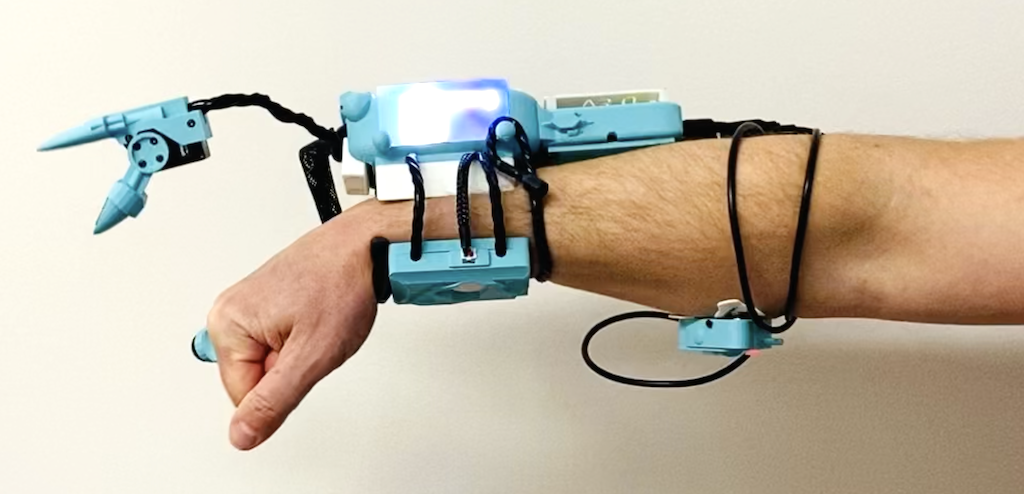
Dr. Pilarski’s research interests include reinforcement learning and decision making, artificial intelligence, real-time machine learning, human-machine interaction, intelligence amplification, rehabilitation technology, and assistive robotics. He leads an interdisciplinary initiative focused on creating intelligent artificial limbs to restore and extend abilities for people with amputations. As part of this research, Dr. Pilarski has developed and made prominent machine learning techniques for continual sensorimotor control and prediction learning on prosthetic devices. These include some of the first published approaches to ongoing user training of upper-limb prosthesis control systems via reinforcement learning, and he pioneered the use of general value functions in prediction learning to continually adapt myoelectric control interfaces in real time. Dr. Pilarski’s research programme continues to explore human-device interaction and communication, long-term co-adaptation and joint action between agents, patient-specific device optimization, and constructivism in tightly coupled human-machine interfaces. He has also created techniques for rapid cancer and pathogen screening through work on biomedical pattern recognition, robotic micro-manipulation of medical samples, and hand-held diagnostic devices. With over 20 years of experience in AI and machine learning, Dr. Pilarski is the award-winning author or co-author of more than 130 peer-reviewed articles, a Senior Member of the IEEE, and has been supported by provincial, national, and international research grants.
In 2017, Dr. Pilarski was one of three Amii researchers who brought the first international research office of Alphabet Inc.’s subsidiary DeepMind to Edmonton, Alberta. He served as the office’s co-lead and a Senior Staff Research Scientist until 2023. Dr. Pilarski currently serves as a director on the board of the Alberta Machine Intelligence Institute (Amii; 2017-present) one of three national not-for-profit institutes established as part of the Pan-Canadian Artificial Intelligence Strategy. Prior to its incorporation, he served on Amii’s management advisory board within the University of Alberta (2014-2016). He also serves as a director on the board of Silvacom Holdings Corp. Dr. Pilarski regularly delivers invited keynotes to boards, business organizations, policy makers, and the general public on the growing impact of artificial intelligence on medicine, industry, and society. He previously founded a startup company, actively engages in consulting and venture investment, has created multiple arts organizations, and has further governance experience in the arts sector on steering councils and advisory boards of regional and national creative arts organizations.
- Artificial Intelligence
- Upper-limb Prostheses
- Rehabilitation Technology
- Reinforcement Learning
- Continual Machine Learning
- Human-Machine Interaction
- Intelligence Amplification
- Assistive Robotics
- Internet of Body Things (IoBT)
-
ICD.D, Directors Education Program, 2024
Institute of Corporate Directors & University of Toronto Rotman School of Management
-
Postdoctoral Fellowship, Computing Science, 2014
University of Alberta
-
Ph.D., Electrical and Computer Engineering, 2009
University of Alberta
-
B.ASc., Electrical Engineering, 2004
University of British Columbia
Academic Appointments
Trainees & Visitors
PhD Student, Dept. Biomedical Engineering
PhD Student, Dept. Computing Science
PhD Student, Dept. Computing Science
MSc Student, Dept. Mechanical Engineering
MSc Student, Dept. Technology Systems, University of Oslo
MSc Student, Dept. Computing Science
MScRS Student, Faculty of Rehabilitation Medicine
MSc Student, Dept. Computing Science
Visiting Professor, 2019-2020, from Fujita Health University, Nagoya, Japan
Visiting Professor, 2018-2019, from Fujita Health University, Nagoya, Japan
Visiting Professor, 2017-2018, from Fujita Health University, Nagoya, Japan
Visiting Professor, 2017-2018, from the National Center for Geriatrics Gerontology, Nagoya, Japan
PhD, Faculty of Rehabilitation Medicine, 2024
PhD, Dept. Biomedical Engineering, 2024
PhD, Dept. Computing Science, 2023
PhD, Dept. Computing Science, 2023
PhD, Dept. Computing Science, 2020
PhD, Dept. Computing Science, 2019
Postdoctoral Fellow, Dept. Computing Science, 2018-2020
MSc, Dept. Mechanical Engineering, 2019
MSc, Dept. Computing Science, 2018
MSc, Dept. Computing Science, 2017
MSc, Dept. Computing Science, 2017
MScRS, Faculty of Rehabilitation Medicine, 2016
MSc, Dept. Computing Science, 2015
Undergraduate Researcher
Undergraduate Researcher
Undergraduate Researcher
Undergraduate Researcher
Undergraduate Researcher
Undergraduate Researcher
Undergraduate Researcher
Undergraduate Researcher
Undergraduate Researcher
High School Researcher
Undergraduate Researcher
Undergraduate Researcher
Undergraduate Researcher
Undergraduate Researcher
Undergraduate Researcher
Undergraduate Researcher
High School Researcher
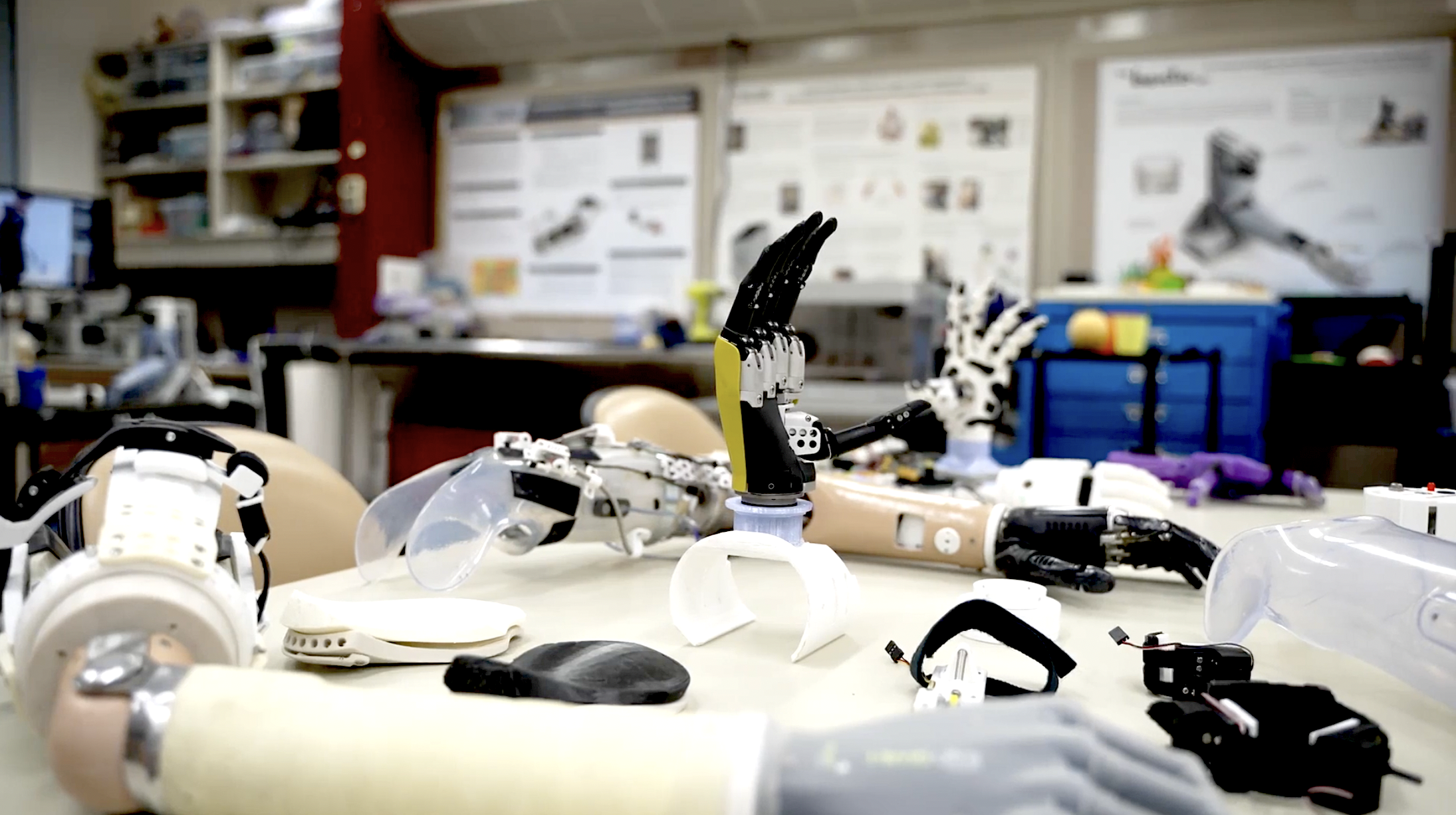
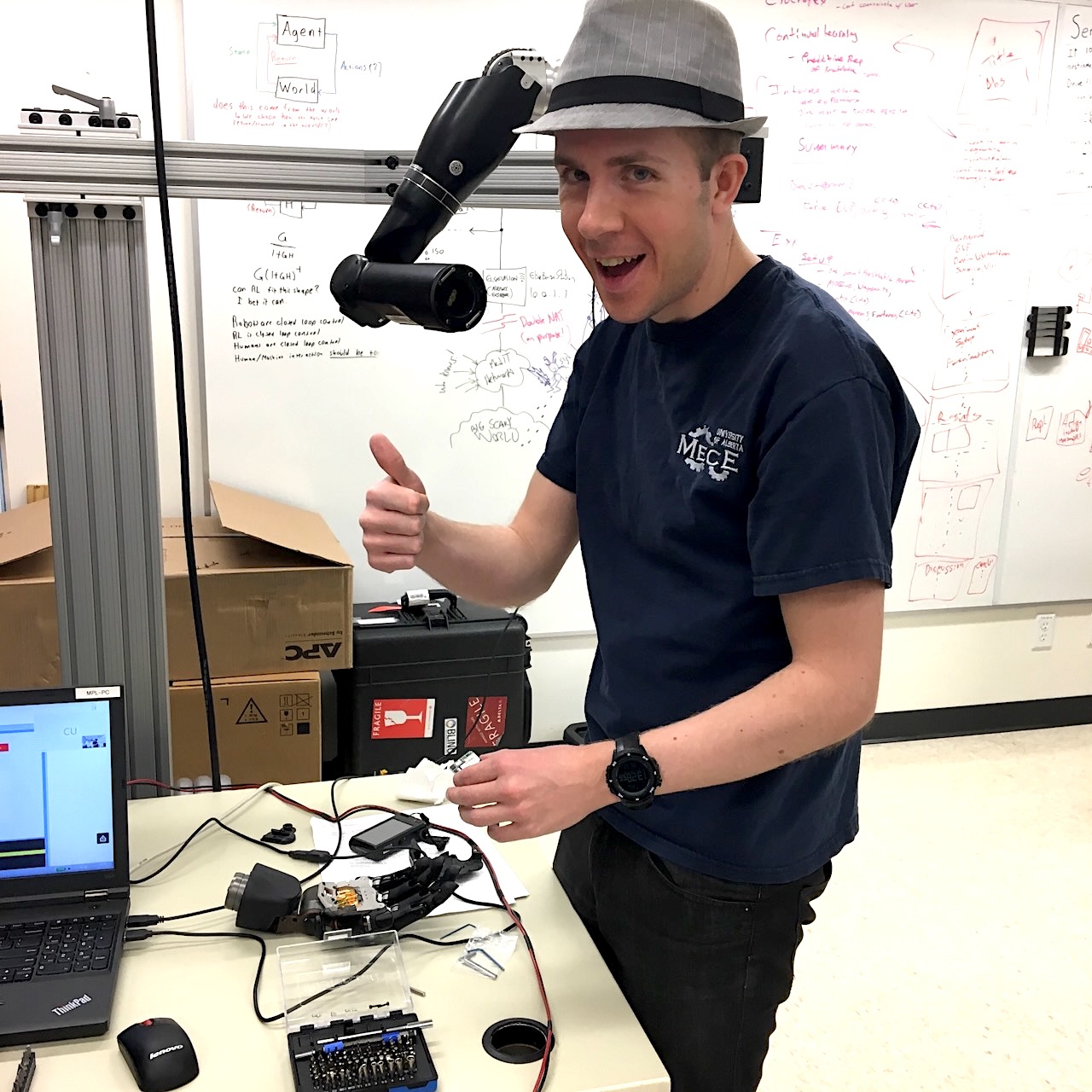
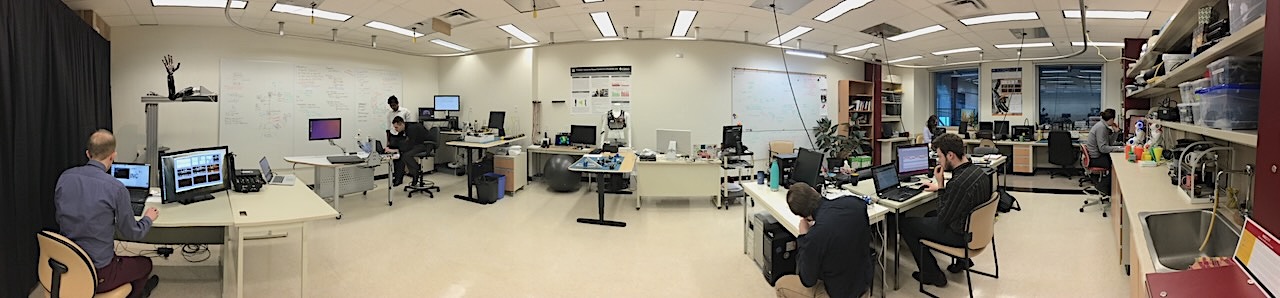
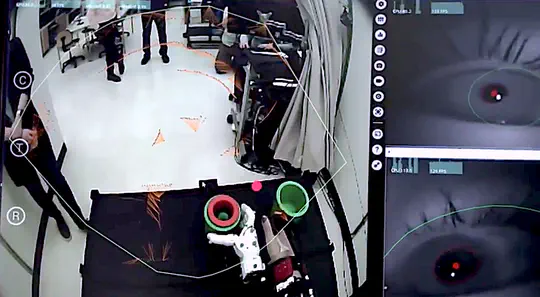
Photo Gallery
The BLINC Lab in Action





Research Snapshots

Selected Videos
Non-Research Interests
Patrick M. Pilarski served as the co-editor of DailyHaiku, an international journal of contemporary English-language haiku, and poetry editor for its sister publication DailyHaiga. He is author of the poetry collection Huge Blue (Leaf Press, 2009), and the chapbooks Contemplating Vows (with Nicole Pakan; Katabatic Books, 2011) and Five Weeks (2007). Patrick’s creative writing has appeared in journals and anthologies across North America, Europe, Australia, and Japan, and on CBC Radio One as part of the CBC Poetry Face-off. A long-time member of the literary community, he has served as an organizer for the Edmonton Poetry Festival and as the Vice President of the League of Canadian Poets.
Other Non-Technical Pursuits:
- Blacksmithing;
- Scuba diving and martial arts;
- Acting and musical theatre;
- Hiking, backpacking, and travel;
- Gardening and tropical fish keeping;
- Graphic design, brush painting, and visual art.
Featured Publications

Student Dissertations
Peer-Reviewed Publications, Abstracts, & Preprints
Selected Talks
Selected Course Websites:
- CMPUT 607, Applied Reinforcement Learning, Winter 2018
- CMPUT 607, Applied Reinforcement Learning, Winter 2017
- CMPUT 609, Reinforcement Learning in Artificial Intelligence, Winter 2015


Recent Media Coverage
- May 23, 2023: CTV Morning Live (TV/Video Interview)
- May 23, 2023: Unite.AI (Print Interview)
- Mar. 10, 2023: Global News Edmonton (TV/Video Interview)
- Mar. 9, 2023: CBC Radio One: RadioActive (Radio Interview)
- Mar. 8, 2023: CTV News Edmonton (TV/Video Interview)
- Aug. 8, 2022: CBC Edmonton AM (Radio Interview)
- July 29, 2022: Taproot News (Print Coverage)
- June 22, 2022: Edmonton Mayor’s Office (Community Leader Spotlight Video)
- Feb. 25, 2022: CTV News Edmonton (TV/Video Interview)
- Jan. 27, 2022: Edmonton Global (Feature Video)
- Apr. 9, 2019: Canadian Press / CBC News / Globe & Mail (Syndicated News Article)
- Mar. 23, 2017: Global News Edmonton (TV/Video Interview)
- Feb. 15, 2017: Embedded.fm (1.25h Long Audio Interview)
- Jan. 12, 2017: Global News Edmonton (TV/Video Interview)
Contact
For Dr. Pilarski’s interview details and biographical notes only,
For Dr. Pilarski’s full media kit (~32MB) including photos and biographical notes,
- patrick.pilarski@ualberta.ca
- Katz Group Centre for Pharmacy and Health Research, University of Alberta, Edmonton, AB T6G 1G7